Delta Robot
One of the projects I did during university was called “Assesment and optimization of magnetic torquers for spacecraft attitude control“
This involved the conception and development of an automated test stand. After some research I decided to build a delta robot, due to his big working area and smooth movements in comparison to a cartesian robot. Since the kinematics are much more difficult to calculate than in a cartesian robot, I was really lucky to find some open source code for 3D printers, which I could adapt to drive our stepper motors.
Determined by the size of our solar simulator I designed a work envelope which you can see here:

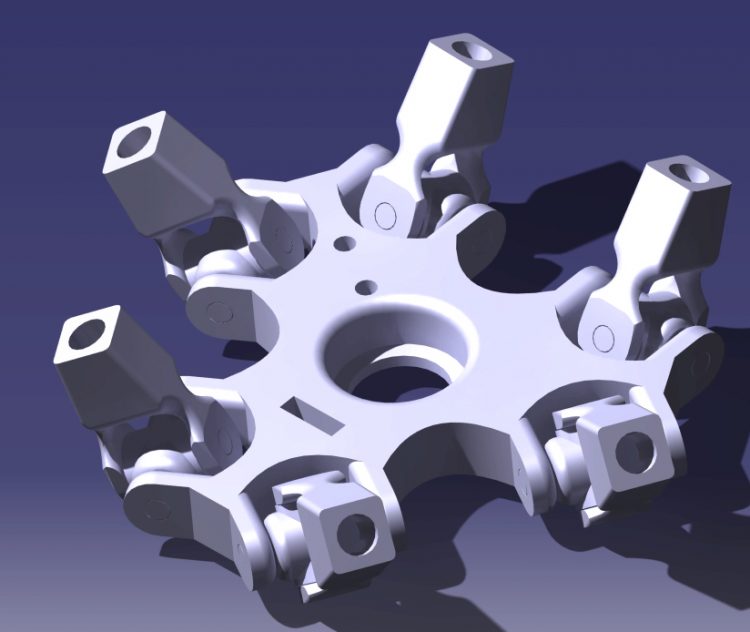
We needed a specific endeffector to keep the sensors in place, and the tolerances for size/rigity/degrees of freedom had to be very strict, so I designed one in 3D which was then printed out of plaster. To save space I designed the universal joints already preassembled.




At a later stage the carriages which are driven by the stepper motors were even printed out of Aluminum for higher rigidity.

And here a video of the movements
What do you think?
You must be logged in to post a comment.